El Motor Sincrónico
Observaciones Generales


En el régimen de generador la máquina sincrónica transforma la potencia mecánica recibida del motor primario en potencia eléctrica entregada a la red primaria conectada al devanado del estator. En el régimen de motor al contrario la máquina sincrónica transforma la energía eléctrica recibida en potencia mecánica consumida por la máquina operadora acoplada al eje de la máquina sincrónica conservando en este caso también la velocidad sincrónica determinada por la frecuencia de la red.
La potencia limite con lo que el motor sincrónico puede funcionar sin salir del sincronismo se determina al igual que el generador por su capacidad limite de sobrecarga.
Otras de las particularidades del motor sincrónico lo constituyen su sincronización con la red de alimentación y las formas utilizadas para su arranque.
Potencia y momento electromagnético del motor sincrónico
$ P_1 $ → Potencia eléctrica aplicada al motor desde la red.
Nota: Parte de esta potencia se utiliza en cubrir las perdidas eléctricas y magnéticas del estator (perdidas del cobre y perdidas del acero), la parte restante constituye la potencia electromagnética.
$P_{e.m.}$ → Potencia electromagnética transmitida desde el estator al rotor.
$ P_{e.m.} = P_1 - P_{electrica} - P_{magnética} $
Esta $ P_{e.m.} $ atraviesa el entre-hierro compensa las perdidas mecánicas por rozamiento y ventilación, así como las perdidas adicionales y se convierte en una potencia útil en el eje del motor ($P_2$).
$ P_2 $ → Potencia útil mecánica en el eje del motor.
$P_2 = P_{e.m.} - P_{mecánica} - P_{ad} $
$P_2 = P_1 - P_{electrica} - P_{magnética} - P_{mecánica} - P_{ad} - P_{excitación} $
El momento electromagnético del motor se obtiene a través de la potencia electromagnética ($P_{e.m.}$).
$ M.e.m. = \frac {P_{e.m.}}{\omega}$
$ \omega = 2\pi n $ → velocidad angular sincrónica del motor.
Puesto que el paso del régimen de funcionamiento de generador a motor se debe al cambio de signo del angulo entre el vector de la fuerza electromotriz inducida $E_0$ y el vector de tensión de la red $U$, entonces las expresiones para las potencias y los momentos del régimen de motor de una máquina sincrónica se obtienen de las correspondientes para el generador, sustituyendo en ella los valores negativos correspondientes del angulo $ \theta $.
$$ ( E_0, U) → \theta $$
No obstante en este caso tanto la potencia como el momento para el régimen de motor resultan negativas con relación a la del generador, sin embargo, cuando estamos estudiando los motores sincrónicos esta potencia y el momento del motor se toman positivas solo indicando que están en régimen de motor de esta forma la potencia $P_1$, en los bornes del estator de un motor de polos salientes y despreciando la resistencia activa pues será para:
$$ r \simeq 0 $$
Motor de polos salientes
$ P_1 = P_{e.m.} = m \frac {E_0 U_{red}} {X_d} + \frac {m U_{red}^2}{2}(\frac{1}{X_q} - \frac{1}{X_d}) Sen 2\theta $
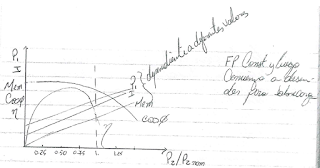
Características de trabajo o funcionamiento del motor sincrónico
Se denomina a esta característica como la variación de:
$$ P_1, I, M, \eta, Cos \varphi = f ( \frac{P_2}{P_{2 nominal}}) $$
Para $ U_{red} $ = constante, $ f $ = constante y una excitación permanente.

Nota: el factor de potencia se mantiene constante para luego tener un ligero desfasamiento para sobrecargas.
Métodos de arranque del motor sincrónico
Arranque por medio de un motor auxiliar
El motor sincrónico se puede conectar a la red por medio de dispositivos de sincronización al igual que el generador sincrónico y para estos fines e acopla a su propio eje un pequeño motor de arranque especial con el objetivo de alcanzar su velocidad sincrónica, y como motor auxiliar se utilizan realmente un pequeño motor asincrónico con potencia relativamente pequeña. Por medio de este motor se pone en rotación y alcanza su velocidad sincrónica o casi sincrónica después de lo cual se conecta en paralelo a la red por el método de auto-sincronización, mas luego se desconecta el motor auxiliar.
Dentro de sus limitaciones debe destacarse, que el motor bajo ningún concepto debe tener carga y por eso su uso se limita para el arranque de compensadores sincrónicos que es un motor sincrónico trabajando en vacío en un régimen sobre-excitado y de igual forma se utiliza para el arranque de grandes motores sincrónicos pero siempre en régimen de vacío.
Arranque por variación de frecuencia
El motor sincrónico puede arrancase por este método variando suavemente la frecuencia desde cero hasta su valor nominal.
La frecuencia que se varia es la de la tensión aplicada al motor durante el proceso de arranque, para ello el motor se alimenta desde un pequeño generador sincrónico independiente cuya velocidad se varia con auxilio de un motor primario desde 0 a su valor nominal.
Tanto la corriente de excitación del generador como la del motor deben ser debidamente reguladas y la elevación de la frecuencia se hace de forma lenta, sin embargo, con el aumento de la velocidad de rotación es necesario aumentar la corriente de excitación del motor.
Por el grado de complejidad de este método se destina a motores sincrónicas de ciertas instalaciones especiales.
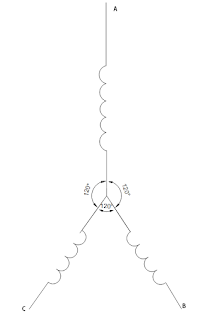
Arranque asincrónico del motor sincrónico
Un motor sincrónico se puede poner en marcha en calidad de motor asincrónico con rotor en corto circuito y actualmente es el método de mayor uso en el arranque de los motores sincrónicos, para llevar a cabo este método el devanado de excitación del rotor del motor sincrónico debe estar en corto circuito y preferiblemente conectado a una resistencia ohmica, con resistencia aproximada a 10 veces mayor que la propia resistencia del devanado de excitación, en caso de que se deje abierto se inducirían tensiones elevadas.
Procedimiento:
- Se conecta a la red el devanado del estator del motor
- Se conecta el devanado de excitación,
El compensador Sincrónico (CS):
Se trata de un motor sincrónico que funciona en vacío y que consume con respecto a la tensión de la red una corriente reactiva que podría ser adelantada o retrasada. Esta máquina se utiliza para mejorar el factor de potencia y para regular la tensión de las lineas de transmisión y de las redes de distribución.
Para mejorar el factor de potencia este funciona en un régimen sobre excitado y por eso consume de la red una corriente capacitiva que compensa la corriente retrasada de los motores asincrónicos y las cargas de los transformadores, esto permite descargar las lineas de alimentación de las corrientes inductivas retrasadas con lo que se logra disminuir las perdidas en la red y mejorar la utilización de los generadores sincrónicos en las centrales eléctricas.
Ilustración de la influencia del compensador sincrónico
$ I_1 $ → Corriente de carga atrasada con relación a la tensión del sistema en un angulo $\varphi_1$

Cuando se conecta el compensador sincrónico se origina la corriente $ I_p$ → adelantada de $U_{sistema}$
$ I_2 = I_1 + I_p $
$ Cos \varphi_1 < Cos \varphi_2 $
$ I_2 < I_0 $
Esto se explica ya que el compensador sincrónico trabaja sin carga su potencia activa es relativamente pequeña solo lo necesario para compensar las perdidas.
Si despreciamos estas perdidas antes de conectar el compensador sincrónico tenemos que;
$$ P_1 = \sqrt{3} U_s I_1 Cos \varphi_1 $$
Después de conectar el compensador sincrónico:
$$ P_2 = \sqrt{3} U_s I_2 Cos \varphi_2 $$
Despreciando las perdidas
$ P_1 = P_2 $ → $ Cos \varphi_2 > Cos \varphi_1 $ → $ I_2 < I_1 $
Con esto los generadores de las plantas se descargan y disminuyen las perdidas.
Para determinar la potencia del compensador sincrónico a instalarse, se determina por la siguiente expresión;
$ Q = P(tan \varphi_1 - tan \varphi_2) $ [KVAR]
Donde:
Q → Potencia reactiva [KVAR]
P → Potencia activa consumida [KW]
$ \varphi_1 $ → antes de conectar el compensador sincrónico
$ \varphi_2 $ → después de conectar el compensador sincrónico
$$ P = \sqrt{3} U_s I Cos \varphi $$
$ I_1 = \frac {P_1}{\sqrt{3} U_s Cos \varphi_1} $
$ I_2 = \frac {P_2}{\sqrt{3} U_s Cos \varphi_2} $
$ \triangle I = I_1 - I_2 $ → Diferencia de corriente alcanzada por el compensador sincrónico
$\frac {Q}{\triangle I} → \frac{Q}{I_1 - I_2} $ $[\frac{KVAR}{amp}]$
Nota: esta relación muestra que potencia debe instalarse para lograr disminuir la corriente o sobrecarga del sistema y esta relación aumenta a medida que el factor de potencia se acerca a la unidad, esto limitaría la potencia del compensador sincrónico a instalar.
Utilización del motor sincrónico como un corrector del factor de potencia
El motor sincrónico a la vez que consume una energía eléctrica del sistema puede trabajar en régimen sobre-excitado absorbiendo una corriente capacitiva del sistema y de esta forma puede mejorar el factor de potencia.
Generalmente se tiende a mejorar el factor de potencia por las siguientes razones:
- La mayoría de los consumidores del sistema tienen cargas de carácter inductiva que se traducen en una disminución del factor de potencia.
- Cuanto menor sea el factor de potencia, tanto mayor es la corriente necesaria para alimentar la misma potencia activa.
- Las razones ya mencionadas provocan mayores caídas de tensión y mayores perdidas eléctricas del sistema.

Entonces se logra disminuir el factor de potencia.
$ I_1$ → Carga antes de conectar el motor sincrónico → $ Cos \varphi_1$;
$ I_2$ → Corriente consumida por el motor sincrónico → $ Cos \varphi_2 $;

Comentarios
Publicar un comentario